


02 - 수술로봇


▲ 이병주 교수
한양대학교 ERICA
수술로봇은 4차 산업혁명의 다양한 핵심 기술이 융합된 분야로서 의료현장 및 기업현장의 협업을 바탕으로 한 적극적인 개발과 투자가 요구된다.
세계적으로 성공한 수술로봇의 사례와 국내의 개발 현황을 살펴보면서 수술로봇 분야 사업을 발전시킬 수 있는 구체적인 방안을 논의해 본다.
기술 간, 분야 간의 융합을 통해 새로운 개념의 기술 및 서비스를 창출하는 4차 산업혁명의 핵심 기술은 로봇, 인공지능, 빅데이터, AR/VR, 사물인터넷 등으로 거론될 수 있다.
수술로봇은 이러한 기술들이 잘 접목될 수 있는 신 서비스 산업 분야이다.
da Vinci 복강경 수술로봇이 대표적인 성공 사례로 시장에 이미 자리 잡았으나 전 세계적으로 새로운 형태의 수술로봇에 대한 연구개발 및 사업화가 진행 중이며 전문가들은 그다음 성공 사례가 무엇이 될지 관심을 기울이고 있다.
의료현장에서 쓰일 수 있는 수술로봇을 개발하기 위해서는 의사, 공학자, 기업, 그리고 병원의 참여가 필수적이며 상호 간의 협업이 무엇보다도 중요하다.
그러나 의료현장과 제품을 생산하는 기업현장 간에는 큰 차이가 존재한다. 누가 그 간격을 메꿔줄 것인가?
수술로봇은 크게 두 가지의 형태로 분류된다(그림 1).
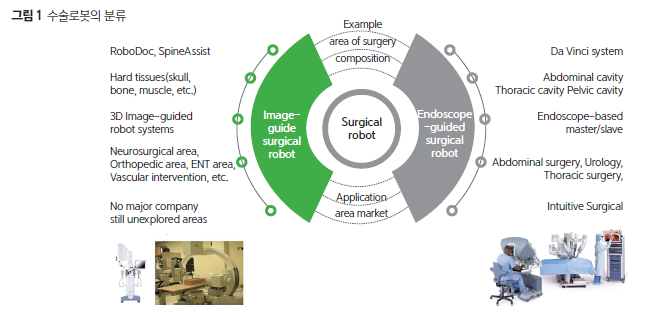
첫 번째는 스테레오 카메라를 사용하여 환부를 관찰하며 마스터-슬래이브 로봇을 활용하여 수술을 진행하는 방식으로 da Vinci 복강경 수술로봇이 대표적인 사례이다.
적용 분야는 복강, 흉강, 요강 및 인후부 등 다양하다.
두 번째는 뇌, 뼈 등과 같이 내부를 들여다 볼 수 없는 수술 분야에 대한 것으로, 수술 전 촬영한 환자의 3D 데이터를 기반으로 영상유도 로봇수술을 수행하는 방식이며 아직까지 세계적인 강자가 존재하지 않는 분야이다.
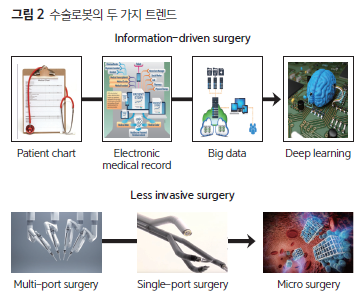
수술로봇의 개발 방향은 최소 침습(Minimally invasive)과 정보 기반(Information-driven)이라는 두가지 트렌드를 따르고 있다.
수술 후의 상처와 통증을 줄여주면서 정확한 수술을 수행하기 위하여 현재는 Multi-port 그리고 Single-port를 활용한 수술을 시행하고 있으며 더 나아가 혈관을 통해 병소까지 마이크로 로봇을 투입해 치료하는 방향으로 발전할 것으로 예측한다.
또한 수술로봇의 초창기 모델들은 아날로그 방식의 환자 데이터를 다루고 있는 반면에 미래의 수술에서는 디지털 방식의 데이터를 추구한다.
이미 상용화된 IBM 왓슨 온콜로지(Watson oncology)는 수많은 환자의 빅데이터를 기반으로 대상 환자의 병변에 대한 치료 방법과 약 처방을 제공하는 인공지능 디지털 엔진이다.
이처럼 미래의 수술로봇은 수많은 환자들의 치료를 통한 빅데이터를 기반으로 대상 환자의 수술 전 획득한 정보로 인공지능을 활용하여 수술방법과 수술 계획을 자동으로 생성해줄 것이다.
또한 수술 중 획득한 데이터를 기반으로 수술 경로를 자동보정해주며, 로봇을 활용하여 정밀하고 성공적인 수술을 수행하게 될 것이다(그림 2).
1980년대 초반 미국 IBM TJ Watson 연구소에서는 세계 최초로 ROBODOC이라는 무릎관절 치환수술로봇을 개발하였다. 회사가 주도적으로 개발한 사례에 해당된다.
그러나 1980년 후반 미국에서 로봇공학에 대한 투자와 관심이 축소되면서 IBM도 수술 로봇에 대한 투자를 멈추고 말았다.
개발 핵심 구성원들은 그 이후 미국 존 홉킨스(Johns Hopkins) 대학으로 옮겼으며, 미국 NSF(National Science Foundation)로부터 10년간 약 350억 원을 지원받아 ERC(Engineering Research Center)를 운영하며 수술로봇 분야에 대한 연구개발과 인력양성을 주도하여 왔다.
현재 da Vinci 복강경 수술로봇을 개발한 Intuitive Surgical과 Verb-surgical, Mako-surgical, Auris 등 굴지의 수술로봇 회사의 엔지니어들, 그리고 미국에서 손꼽히는 대학의 수술로봇 연구자들이 ERC 사업에 참여했던 멤버들이라는 점은 시사하는 바가 크다.
세계에서 두 번째 사업화 모델인 복강경 수술로봇은 미국 국방성 DARPA(Defense Advanced Research Projects Agency)가 주도하였다.
1990년 초 전장에서 부상을 당한 병사를 원격으로 수술하기 위한 수술로봇에 대한 연구를 착수하였고, 비록 전장에서 쓰이기에는 여러 가지로 부족한 기술이었지만 그 기술이 스핀오프(Spin-off) 되어 민간에서 쓰일 수 있도록 개발되었고, 현재 da Vinci 복강경 수술로봇으로 진화된 것이다.
이후 미국은 전 세계적으로 수술로봇의 상용화를 주도해 왔으며, EU 그리고 일본에서도 수술로봇에 대한 연구를 활발히 진행해 왔다.
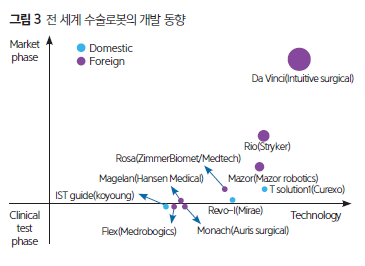
국내에서는 2011년부터 산업통상자원부의 지원으로 다수의 수술로봇들을 성공적으로 개발하였고 현재 사업화 단계에 진입하고 있다(그림 3).
우리나라는 수술로봇을 개발하기 위한 여러 가지 좋은 환경을 지니고 있다.
첫 번째로 우수한 의료진이 많다는 점이다.
이는 세계적인 수술로봇 기업들이 우리나라를 테스트 플랫폼으로 활용하려는 이유이기도하다.
그리고 국내 의료진들은 로봇수술이 메가트렌드(Megatrend)라는 점을 깊이 인식하고 있으며, 연구개발에 적극적으로 참여하고 싶어 한다.
두 번째는 로봇개발의 풍부한 경험이다.
2000년 초부터 정부는 로봇공학 분야를 성장동력의 한 분야로 선정하여 다양한 응용 분야에 쓰이는 로봇을 개발해 오고 있다.
이러한 선행기술들은 수술로봇 개발에 좋은 기반이 되고 있다.
세 번째는 정부의 주도적인 투자이다. 수술로봇은 신시장이며 미래 가치가 있는 것이 확실하지만 기업들이 진입하기에는 초기 리스크가 큰 분야이다.
지난 7년간 산업통상자원부의 의료로봇 분야 R&D 자금지원은 이러한 초기 리스크를 해소시켜 주며 도전정신을 가지고 연구개발에 참여할 수 있는 원동력이 되었고, 결과적으로 성공 사례를 만들 수 있었다.
그러나 수술로봇 개발에 있어서 많은 위협과 도전도 존재한다는 것을 부인할 수 없다.
첫 번째로, 의료기기의 특성상 식약처 인허가 과정, 환자를 대상으로 하는 임상시험, 그리고 긴 사업화 기간에 대한 부담감 등이 걸림돌로 존재한다.
이러한 요소들은 많은 기업들이 의료기기, 수술로봇 분야로 진출하는 것을 꺼려하는 이유가 되고 있다.
그러나 이러한 주저함은 의료기기의 특성에 대한 이해의 부족함에서 올 수도 있다.
그림 4는 의료기기 인허가 과정을 나타낸다.
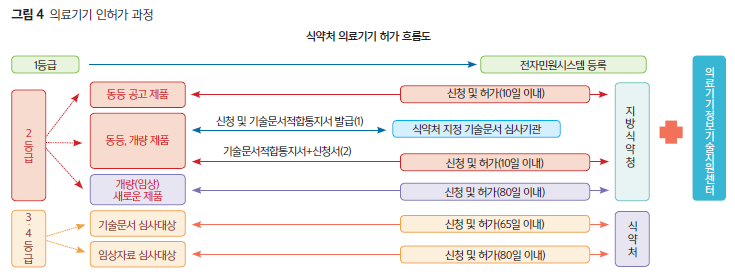
높은 등 급일수록 리스크가 큰 의료기기를 의미한다.
1등급은 인체에 위험을 끼치지 않는 의료기기로서 전자민원을 통해 바로 허가받을 수 있으며, 2등급은 인체에 위험을 줄 수 있는 요소를 다소 지니고 있지만 임상시험 없이 인허가가 가능하다.
한 가지 특이한 점은 동등한 목적으로 쓰이는 수술로봇이 이미 인허가를 받은 경우에는 인허가 기간이 짧아진다는 것이다.
그러나 3-4등급의 의료기기는 반드시 환자를 대상으로 하는 임상시험이 수반되어야 한다.
미국과 EU의 인허가 기준도 크게 다르지 않으며 현재는 국제인증기준 IEC 60601-1 3.1Ed에 맞춰 수술로봇을 개발하면 모든 나라에서 동일한 서류로 인허가를 받을 수 있다.
이미 상용화된 da Vinci 복강경 수술로봇은 3등급에 해당되는 기술로서 길고 험한 기술개발 및 임상시험 과정을 통과하였다.
이를 보면 국내 독자기술로 개발한 da Vinci 타입 수술로봇 Revo-I(미래컴퍼니)가 얼마나 대단한 기술인지 짐작할 수 있다.
두 번째로, 어떤 분야를 선택할 것인가에 대한 고민을 갖게 된다.
주목할 것은 현재 전 세계적으로 개발되고 있는 수술로봇은 대부분 2등급에 해당된다는 점이다.
이러한 경향은 현재 수술로봇을 개발하고 있거나 앞으로 개발에 참여하는 기업들 및 의료진에게 다음과 같이 중요한 가이드라인을 제공해 준다.
· Start from a simple one(Level 1)
· Add something to Level 1 to improve performance(Level 2)
· Use current tools, but just add something to improve surgical performance(Level 2)
· Do not follow da Vinci type and do something else
· Devise unified design approach for several purposes
· Let the surgeon conduct surgery
그렇다면 이제 구체적인 아이디어를 도출하기 위해서는 의료진과의 긴밀한 논의가 필요한데, 이러한 환경을 어떻게 구축해야 하는 것일까?
이것은 해당 기관의 의지 또는 주도적인 주체가 필요하다. 미국의 밴더빌트(Vanderbilt) 대학은 캠퍼스 내에 병원이 있으며, 대학이 주도적으로 수술로봇을 육성하고자 공학 분야의 젊은 교수들을 영입하고 의료진과의 연합의 장을 마련해 주고 있다.
일본 규슈대학병원은 의료진이 주도적으로 수술로봇에 대한 연구환경을 구축하고 엔지니어들과의 협업을 통해 수술로봇 연구를 수행하고 있다.
현재 국내에서 진행 중인 연구중심병원 프로젝트는 이러한 공동연구의 플랫폼을 만들 수 있는 하나의 기회가 될 수 있다.
대한의료로봇학회는 의료진과 공학자 그리고 기업과의 연합의 장을 마련해 주기 위해 연간 세 번의 학술행사를 개최하고 있다.
최근 정부에서는 기술융합분야인 의료기기 분야 육성을 위하여 연구개발, 인증, 사업화 전 단계를 아우르는 범부처 R&D사업을 추진하고 있는데 이는 국가 주도의 좋은 사례라고 판단된다.
의료기기 분야는 다양한 기술 및 부품의 융합으로 구성되기 때문에 산업이 형성되면 많은 일자리 파생이 가능하다.
그러나 개발단계에 있어서는 전문인력의 역할이 매우 중요하다.
미국에서는 현재 수술로봇 스타트업회사들이 많이 설립되고 있는데, 이것을 뒷받침해 주는 전문인력이 있기에 가능한 것으로 판단된다.
따라서 국내의 의료로봇 산업 분야를 진흥시키기 위해서는 국가 연구개발 과제의 지원뿐만 아니라 전문인력양성프로그램을 통해 산업을 받쳐주는 맞춤형 전문가를 양성하는 것이 성공적인 산업화의 핵심요소가 될 것이다.
또한 정부의 역할뿐 아니라 민간 차원의 적극적인 관심과 투자가 뒷받침될 때 연구자들의 다양한 아이디어와 기술들이 조기에 발굴되고 더욱 효과적으로 산업화될 수 있을 것으로 기대한다.
< 참고 >
01 이병주, 김경훈, 수술로봇 기술동향과 산업전망 KEIT PD Issue Report 2017년 11월 Vol. 17-3.
02 의료로봇분야 기술경쟁력연구, 충북대학교 김응도, 2016.
03 식약처 신개념 의료기기보고서 2017년 2월.
04 의료로봇분야 국내 기술수준 KISTEP, 2015.
05 Frost & Sullivan, Image-guided Surgery and Robot-Assisted Market in Asia-Pacific.